
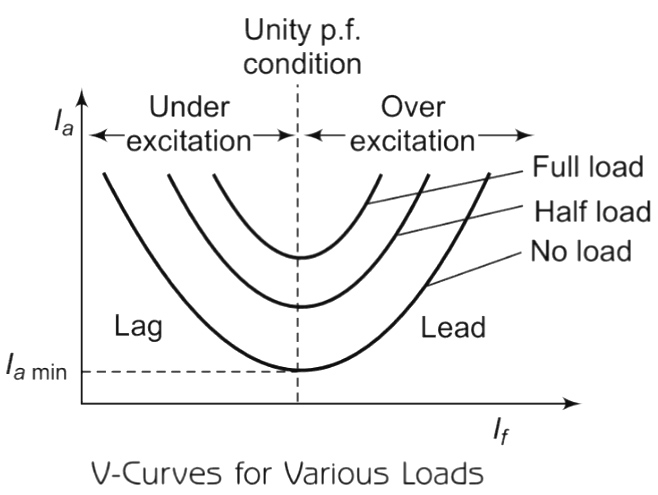
In a synchronous motor, the armature current has large values for
Right Answer is:
Both high and low excitation
SOLUTION
In a synchronous motor, the armature current has large values for both high and low excitation.
The synchronous motor always adjusts its cosφ i.e., power factor nature so that Power component Ia cosφ remains constant when excitation of the motor is changed keeping the load constant. This is the reason why a synchronous motor reacts by changing its power factor to variable excitation conditions.
Under excitation condition: When the excitation is adjusted in such a way that the magnitude of induced emf is less than the applied voltage (Eb < V) the excitation is called under excitation.
Due to this, ER increases in magnitude. This means for constant Synchronous Impedance (Zs), the current drawn by the motor increases. But ER, the phase shift in such a way that, phasor Ia, also shifts (as ER ∧ Ia = θ) to keep the Power component of Ia i.e Ia cosφ components constant. So in under excited conditions, the current drawn by the motor increases. The power factor cosφ decreases and becomes more and more lagging in nature.
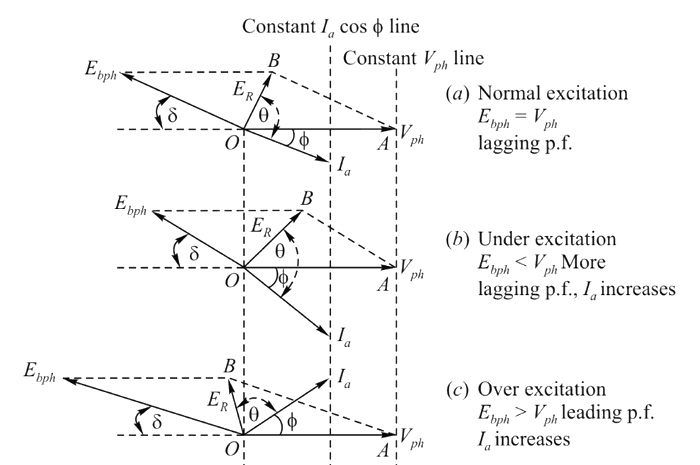
Over excitation condition: The excitation to the field winding for which the induced emf becomes greater than the applied voltage (Eb > V) is called overexcitation.
Due to the increased magnitude of Eb, ER also increases in magnitude. But the phase of ER also changes. Now (as ER ∧ Ia = θ) is constant, hence Ia also changes its phase, So φ changes. The Ia increases to keep Ia cosφ constant. The phase of ER changes so that Ia becomes leading with respect to Vph in over-excited conditions. So power factor of the motor becomes leading in nature. So overexcited synchronous motor works on leading power factor. So power factor decreases as over excitation increases but it becomes more and more leading in nature.
Two important points stand out clearly from the above discussion :
(i) The magnitude of armature current varies with excitation. The current has a large value both for low and high values of excitation (though it is lagging for low excitation and leading for higher excitation). In between, it has a minimum value corresponding to a certain excitation. T
(ii) For the same input, armature current varies over a wide range and so causes the power factor also to vary accordingly. When over-excited, motor runs with leading p.f. and with lagging p.f. when under-excited. In between, the p.f. is unity.
- When the motor is under excited, the armature current and power factor is lagging. In this case, the motor behaves like an inductive load.
- When the motor is normally excited, the power factor is unity. In this case, the armature current is minimum and is in phase with the terminal voltage.
- When the motor is over-excited, the power factor is leading. In this case, the motor behaves like a capacitive load.
For synchronous Motor MCQ Click Here