
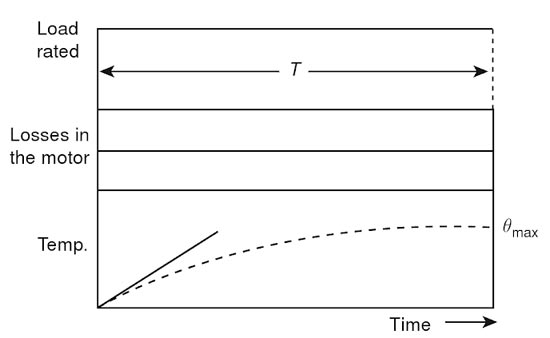
Ques 11. The graph shown below is related to which type of class in the motor
- Continuous Duty with constant Load
- Continuous Duty With the variable load
- Short Time duty
- Intermittent duty
Answer. 1. Continuous Duty with constant Load Explanation:- Continuous Duty There are two types of continuous duty In Continuous duty at constant load, the load torque remains constant for a sufficiently long period corresponding normally to a multiple of the time constant of the drive motor. The drive motor is therefore loaded for a sufficient amount of time continuously, till it attains thermal equilibrium. While driving such a load a motor should have a rating sufficient to drive it without exceeding the specified temperature. The rating of the motor selected for this duty is called its continuous rating or design rating. By continuous rating, one means that it is the maximum load that the motor can give continuously over a period of time, without exceeding the temperature rise. Also, the motor selected should be able to withstand momentary overloads. Therefore, the selected motor may sometimes have a rating slightly greater than the power required by the load. The load diagram and the temperature rise curve of the motor selected for the purpose are shown in Fig. Centrifugal pumps, fans, conveyors, and compressors are some types of loads where this type of continuous duty at constant load is required. Selection of a motor for this class of duty is rather simple and straightforward. From the load characteristics or requirements, one can determine the continuous input required to the mechanical load. A suitable motor may be selected from the catalog of series manufactured motors. The design rating normally takes care of heating and temperature rise and the motor normally has a short time overload capacity. While selecting a motor for this type of duty it is not necessary to give importance to the heating caused by losses at starting even though they are more than the losses at rated load. This is because the motor does not require frequent starting. It is started only once in its duty cycle and the losses during starting do not have much influence on heating. Ilowever, sometimes it may be necessary to check whether the motor has sufficient starting torque if the load has the considerable amount of inertia.
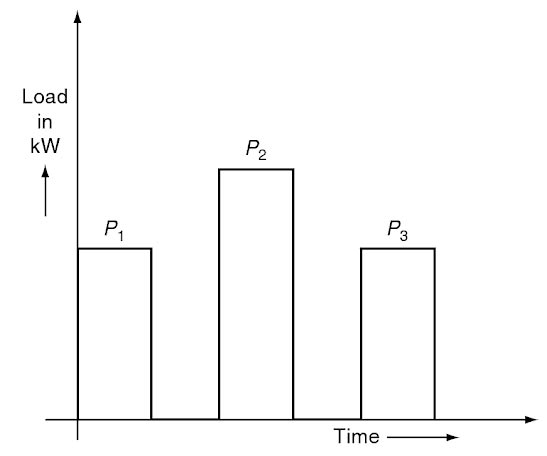
Ques 12. The graph shown below is related to which type of class in the motor
- Continuous Duty with constant Load
- Continuous Duty With the variable load
- Short Time duty
- Intermittent duty
Answer. 2. Continuous Duty with variable Load Explanation:- Continuous Duty with Variable Load:- In this type of duty, the load is not constant but has several steps in one cycle. This cycle of loading repeats for a longer time. If the load variations are slight the motor of the continuous rating of the highest load may be chosen from the available catalog. However, if the variations in the load cycle are large the machine undergoes a continuous change of temperature. However, after several cycles of operation, the motor selected may attain a steady-state value. The thermal calculations of the motor are involved. The selection of a motor based on heating is rather involved and a difficult task. Therefore some simplified criteria may be evolved for selecting a motor for this duty. The motors operating for such types of duties will have poor efficiency and also poor power factor. The selection of motor for this type of duty may be based on average power or average current method.
Ques 12. _________ duty cycle consist of frequent on load and off-load period.
- Continuous Duty with constant Load
- Continuous Duty With the variable load
- Short Time duty
- Intermittent duty
Answer.4 Intermittent duty Explanation:- An intermittent duty rating refers to a sequence of identical duty cycles. Each cycle consists of an on-load and off-loads period with the motor coming to rest during the latter. The on-load period during one cycle is too short for the motor to reach a steady thermal condition, and the off-load period is likewise too short for the motor to cool to the temperature of the cooling medium. Starting and braking are not taken into account on the assumption that the times taken up by these events are too short in comparison with the on-load period, and therefore do not appreciably affect the heating of the motor. The load torque during one cycle may be greater than the rated torque of the motor. The load torque during one cycle may be greater than the rated torque of the motor. When stating the motor power for this form of duty, it is also necessary to state the cyclic duration factor: cyclic duration factor = (on time/cycle time) x 100% The standards specify that the duration of one cycle must b shorter than 10 min. Cases, where the duty cycle is longer than 10 min, must be brought to the attention of the motor manufacturer.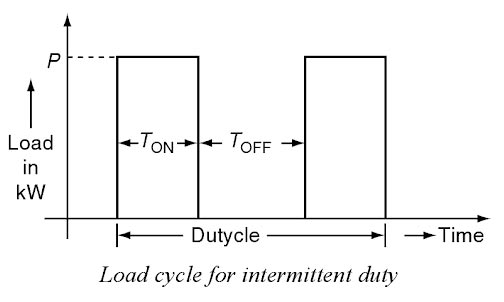
Ques 13. Which duty cycle is preferred if the load requires a constant power for short period of time and rest for sufficient longer duration.?
- Short Time duty
- Intermittent duty
- Intermittent duty with starting
- Intermittent duty with starting and braking
Answer. 1. Short Time duty Explanation:- A short time rating of an electric motor can be defined as the extrapolated overload rating of the motor which it can supply for the specified short time without getting overheated. In this type of duty, the load occurs on the motor during a small interval and remains idle for a long time to re-establish the equality of temperature with the cooling medium. The variation of the load against time for short-time duty is shown in Fig. When a motor is used for this purpose, duration of the load on the motor is less than the heating time constant of the motor or the time required for obtaining thermal equilibrium. The period of rest is sufficient enough to cool the motor to the ambient temperature. The rating of the motor is called short time rating. The motors may have 10 minutes, 30 minute or 60 minute rating based on this criterion. The motor is thermally well utilized. Nowadays the machines are being designed and manufactured for short duration having sufficient overload torque capability. Usually, such type of short-time duty occurs in bridges, lock gates, and some, other household appliances such as mixies.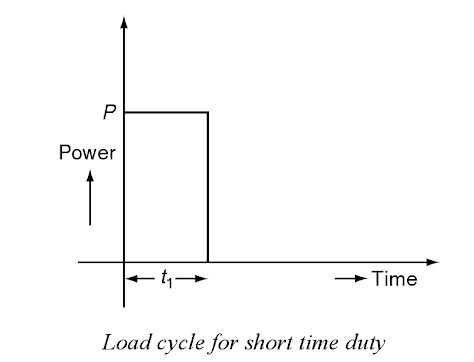
Ques 14. The graph shown below is related to which type of class in the motor
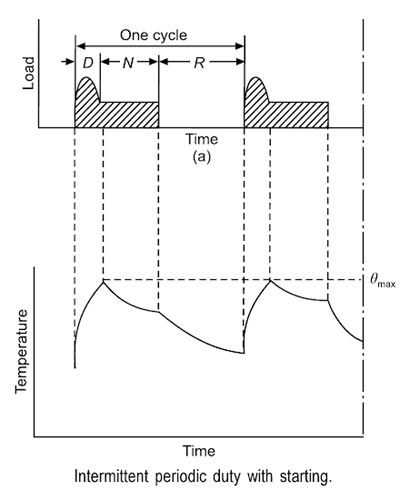
Where D = starting time
N = Operation time under rated load
R = time for rest
- Short Time duty
- Intermittent duty
- Intermittent duty with starting
- Intermittent duty with starting and braking
Answer.3 Intermittent duty with starting Explanation:- Intermittent periodic duty with starting:- The intermittent periodic duty with starting consists of the sequence of identical duty cycles each comprising a period of starting, a period of operation of constant load followed by a rest period. The operating and rest periods of the motor are short to attain the thermal equilibrium during one duty cycle. In Intermittent periodic duty with starting the stopping of the motor, is obtained by natural deceleration after disconnecting the electric supply by means of mechanical brake which does not cause additional heating of the windings. This type of duty is characterized by the cyclic duration factor, the number of duty cycles factor of inertia which is the ratio of the combined inertia of the motor and load to the motor inertia. Cyclic Duration = (D + N) ⁄ (D + N + R) Where D = starting time The factor of Inertia = (Inertia of load + Inertia of motor) ⁄ (Inertia of Motor) Examples:- Motors that drive metal cutting lathes and certain auxiliary equipment of rolling mills are subjected to such operating conditions.
N = Operation time under rated load
R = time for rest
Ques 15 . Which of the following motors is preferred for traction work?
- Synchronous Motor
- 3 phase induction motor
- DC Shunt Motor
- Single phase induction motor
Answer. 2. 3 Phase Induction Motor Explanation:- For electric traction, DC series motors are best suited. DC series motors and AC series motors are very much recommended, as they provide a high starting torque Nowadays three-phase induction motors are also being used.
Ques 16. For an application that requires smooth and precise speed control over the wide range, the motor is preferred is
- Squirrel cage Induction Motor
- Synchronous Motor
- DC motor
- Wound Rotor Induction Motor
Answer 3. DC Motor Explanation:- A DC motor is any of a class of rotary electrical machines that converts direct current electrical energy into mechanical energy. Controlling speed of DC motors is a crucial matter since different machines and equipment have different aspects and output speed or torque requirement in which prospect. Speed Control may require to be very precise and over wide ranges as well. So before implementing the proposed system an engineer needs to understand its operation and according to that how the speed of the drive wit] be controlled need to be decided by him with proper care. Generally, the rotational speed of a DC motor is proportional to the voltage applied to it, and the torque is proportional to the current. Speed control can be achieved by variable battery tapings, variable supply voltage, resistors or electronic controls. The direction of a wound field DC motor can be changed by reversing either the field or armature connections but not both. This is commonly done with a special set of contactors (direction contactors). The effective voltage can be varied by inserting a series resistor or by an electronically controlled switching device made of thyristors, transistors or, formerly, mercury arc rectifiers. Speed control over a wide range both above and below the rated speed: High starting torque: Accurate steep less speed with constant torque:
The attractive feature of the dc motor is that it offers the wide range of speed control both above and below the rated speeds. This can be achieved in dc shunt motors by methods such as armature control method and field control method. This is one of the main applications in which dc motors are widely used in fine speed applications such as in rolling mills and in paper mills.
DC series motors are termed as best suited drives for electrical traction applications used for driving heavy loads in starting conditions. DC series motors will have a starting torque as high as 500% compared to normal operating torque. Therefore dc series motors are used in the applications such as in electric trains and cranes.
Constant torque drives are one such the drives will have motor shaft torque constant over a given speed range. In such drives, shaft power varies with speed.
Ques 17. Which type of drive can be used for Hoisting Machinery?
- AC slip Ring Motor
- Ward Leonard Method
- Cumulative Compound Motor
- All of the above
Answer 4. All of the above Explanation:- Cranes and Hoists for electric motor drive The requirements of the drive are as follows: The acceleration and retardation must be uniform. For exact positioning of loads creep speeds must be possible. The motion of the crane is in all three dimensions. The drive must have high speeds in both directions horizontal and vertical. The speed must be constant while lowering the loads. Mechanical braking must be available in an emergency. Due to the heavy inrush of current at starts, fluctuations in supply voltage are possible. The drive motor must be capable of withstanding such fluctuations. Among the d.c. motors, the series motors, and cumulative compound motors are most preferred for crane operations. The motors have good starting torque, high torque capacity at light loads, the simple arrangement of braking, electric braking at low speeds is possible. The only disadvantage is that the motors are less stable while the regenerative braking. So additional stabilizing circuits are necessary. Advances made in the technology of solid-state devices have enabled the use of thyristor converters and choppers for driving the d.c. motors used in cranes and hoists with good accuracy, reliability, and efficiency. ⇒ The characteristics of cumulative compound motor lie between those of shunt and series motors. The series field provides a high starting torque and the shunt field prevents overrunning in the no-load condition. These motors are used for drives where high starting torque is required with the probability of the load being totally removed such as punch, press, shears, planning machine, conveyors, crushers, bulldozers, lid haulage gears, mine hoist, power fans, rolling mills, stamping press and the large printing press. ⇒ In SLIP RING induction motor the ends of the rotor windings are externally connected by a variable rheostat (resistance is varied in order to give it proper starting and running current). So more the resistance, more the torque. When we add resistance to the rotor the torque is high, the slip is high and the current is reduced. With the correct value of (usually) resistance inserted in the rotor circuit, a near-unity relationship between torque and supply current at starting can be achieved, such as 100%full load torque (FLT), with 100% full load current (FLC) and 200% FLT with 200 percent FLC. This is comparable with the starting capability of the dc machine. Not only high starting efficiency but also smoothly controlled acceleration historically gave the slip ring motor a great popularity for lift, hoist and crane applications. ⇒The working of Ward Leonard Method is already discussed in Question Number 2. Ward Leonard system is commonly employed for elevators, hoists, and main drive in steel mills, as this method can give unlimited speed control in either direction. Since the generator voltage can be varied gradually from zero, no extra starting equipment is required to start up the main motor smoothly.
Ques 18. Which type of drive can be used for Textile Industry?
- DC Motor
- Squirrel cage Induction Motor
- Cumulative Compound Motor
- Synchronous Motor
Answer 2. Squirrel cage Induction Motor Explanation:- Textile Industry:- The textile mill has various processes like ginning, spinning, and looms. The ginning means the separation of seeds from cotton. The process requires standard starting torque and standard overload capacity, at a constant speed. No speed control is required. The operation is at a constant speed. The standard squirrel cage induction motor the proper choice. The twisting to produce continuous yarn of sufficient strength is called the spinning process. The moderate starting torque and high overload capacity are necessary. Acceleration must be constant or uniform so that there is no breakage of the thread. Since the Induction motor is almost a constant speed motor hence the operation is at a constant speed, therefore, no speed control is necessary but two-speed motors are preferred. Normally a 4 pole to 6 pole squirrel cage induction motor is used. Before the yarn is actually woven, it is made into a uniform layer. The process is called weaving and done in a loom. This requires 2 to 2.3 times rated torque at start. There are frequent starts and stops. But the operation is at a constant speed and no speed control is necessary. The totally enclosed high torque squirrel cage induction motors are preferred. The motors are usually of 6 or 8 poles. The ratings of the motors for light fabrics such as cotton silk. rayon etc are 0.37, 0.55 to 1.5 kW while for wool it is 2kW to 3.7 kW.
Ques 19. Which type of drive can be used for Minning Process?
- DC Motor with Ward Leonard Speed control
- Double Squirrel cage Induction Motor
- Slip Ring Induction Motor
- All of the above
Answer.4. All of the above Explanation:- Coal and Mining Industry:- The motors used in coal and mining are classified into two groups. The first group is drives for mine accessories such as compressors, pumps, etc. While the second motors are used for actual mining process i.e. to drive the cutters, drillers etc. It is necessary that the motors used for coal and mining must be flame proof. The atmosphere is generally hot with high ambient temperature and also humid. The motors should have humid-proof insulation. The coal cutting or drilling do not require any speed control as the processes are constant speed processes. High starting torque is necessary. The high starting torque squirrel cage motors with double cage are preferred for these applications. For haulage purposes, the motors are able to start large drums. So they must have high starting torque. The speeds required are different at different haulage stages. Frequent starts and stops are required. To meet these requirements the slip ring induction motor with rotor resistance starter is preferred. The mine winder motor may be a D.C motor win Ward Leonard speed control or slip ring motor with rotor resistance starter is preferred. The centrifugal pumps are used in mining for various jobs like pumping water. The high torque squirrel cage motors which do not have any maintenance problems are selected.
Ques 20. A wound rotor induction motor is preferred over a squirrel cage induction motor when the major consideration involved is
- High starting Torque
- Low starting current
- Speed control over the limited range
- All of the above
Answer 4. All of the above Explanation:- The wound-rotor induction motor is also called a slip ring induction motor. The energy is collected through the slip rings connected to the rotor shaft the squirrel cage motors have copper end rings under the brush from where the short-circuited current can be collected. Advantages of slip ring Induction motor dis-advantages of slip ring Induction motor
