1. If M and N are the orders of numerator and denominator of rational system function respectively, then how many multiplications are required in direct form-I realization of that IIR filter?
A. M+N-1
B. M+N
C. M+N+1
D. M+N+2
Answer: C
From the direct form-I realization of the IIR filter, if M and N are the orders of numerator and denominator of rational system function respectively, then M+N+1 multiplications are required.
2. If M and N are the orders of numerator and denominator of rational system function respectively, then how many additions are required in direct form-I realization of that IIR filter?
A. M+N-1
B. M+N
C. M+N+1
D. M+N+2
Answer: B
From the direct form-I realization of the IIR filter, if M and N are the orders of numerator and denominator of rational system function respectively, then M+N additions are required.
3. If M and N are the orders of numerator and denominator of rational system function respectively, then how many memory locations are required in direct form-I realization of that IIR filter?
A. M+N+1
B. M+N
C. M+N-1
D. M+N-2
Answer: A
From the direct form-I realization of the IIR filter, if M and N are the orders of numerator and denominator of rational system function respectively, then M+N+1 memory locations are required.
4. In direct form-I realization, the all-pole system is placed before the all-zero system.
A. True
B. False
Answer: B
In direct form-I realization, the all-zero system is placed before the all-pole system.
5. If M and N are the orders of numerator and denominator of rational system function respectively, then how many memory locations are required in direct form-II realization of that IIR filter?
A. M+N+1
B. M+N
C. Min [M, N]
D. Max [M, N]
Answer: D
From the direct form-II realization of the IIR filter, if M and N are the orders of numerator and denominator of rational system function respectively, then Max[M, N] memory locations are required.
6. The basic elements of a flow graph are branches and nodes.
A. True
B. False
Answer: A
A signal flow graph provides an alternative, but an equivalent graphical representation to a block diagram structure that we have been using to illustrate various system realizations. The basic elements of a flow graph are branches and nodes.
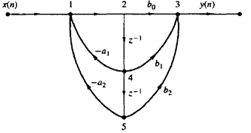
7. Which of the following is true for the given signal flow graph?
A. Two-pole system
B. Two zero system
C. Two pole and two zero system
D. None of the mentioned
Answer: C
The equivalent filter structure of the given signal flow graph in the direct form-II is given as
Thus from the above structure, the system has two zeros and two poles.
8. What are the nodes that replace the adders in the signal flow graphs?
A. Source node
B. Sink node
C. Branch node
D. Summing node
Answer: D
The summing node is the node that is used in the signal flow graph which replaces the adder in the structure of a filter.
9. The output signal of a system is extracted at a sink node.
A. True
B. False
Answer: A
The input to a system originates at a source node and the output signal is extracted at a sink node.
10. If we reverse the directions of all branch transmittances and interchange the input and output in the flow graph, then the resulting structure is called as _______
A. Direct form-I
B. Transposed form
C. Direct form-II
D. None of the mentioned
Answer: B
According to the transposition or flow-graph reversal theorem, if we reverse the directions of all branch transmittances and interchange the input and output in the flow graph, then the system remains unchanged. The resulting structure is known as transposed structure or transposed form.
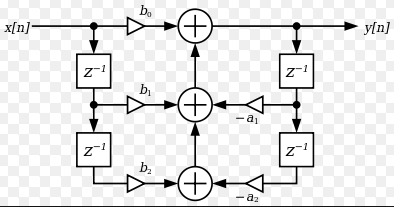
11. What does the structure given below represent?
A. Direct form-I
B. Regular Direct form-II
C. Transposed direct form-II
D. None of the mentioned
Answer: C
The structure given in the question is the transposed direct form-II structure of a two-pole and two zero IIR systems.
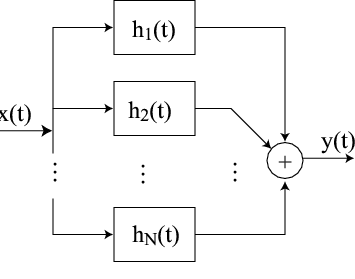
12. The structure shown below is known as ________
A. Parallel form structure
B. Cascade structure
C. Direct form
D. None of the mentioned
Answer: A
From the given figure, it consists of a parallel bank of single-pole filters and thus it is called a parallel form structure.
13. The state-space or the internal description of the system still involves a relationship between the input and output signals, what is the additional set of variables it also involves?
A. System variables
B. Location variables
C. State variables
D. None of the mentioned
Answer: C
Although the state space or the internal description of the system still involves a relationship between the input and output signals, it also involves an additional set of variables, called State variables.
14. State variables provide information about all the internal signals in the system.
A. True
B. False
Answer: A
The state variables provide information about all the internal signals in the system. As a result, the state-space description provides a more detailed description of the system than the input-output description.
15. Which of the following gives the complete definition of the state of a system at time n0?
A. Amount of information at n0 determines output signal for n≥n0
B. Input signal x(n) for n≥n0 determines output signal for n≥n0
C. Input signal x(n) for n≥0 determines output signal for n≥n0
D. Amount of information at n0+input signal x(n) for n≥n0 determines output signal for n≥n0
Answer: D
We define the state of a system at time n0 as the amount of information that must be provided at time n0, which, together with the input signal x(n) for n≥n0 determines the output signal for n≥n0.
16. From the definition of the state of a system, the system consists of only one component called the memoryless component.
A. True
B. False
Answer: B
According to the definition of the state of a system, the system consists of two components called the memory component and memoryless component.
17. If we interchange the rows and columns of the matrix F, then the system is called as ________
A. Identity system
B. Diagonal system
C. Transposed system
D. None of the mentioned
Answer: C
The transpose of the matrix F is obtained by interchanging its rows and columns, and it is denoted by FT. The system thus obtained is known as Transposed system.
18. A single input single output system and its transpose have identical impulse responses and hence the same input-output relationship.
A. True
B. False
Answer: A
If h(n) is the impulse response of the single input single output system, and h1(n) is the impulse response of the transposed system, then we know that h(n)=h1>(n). Thus, a single input single output system and its transpose have identical impulse responses and hence the same input-output relationship.
19. A closed-form solution of the state space equations is easily obtained when the system matrix F is?
A. Transpose
B. Symmetric
C. Identity
D. Diagonal
Answer: D
A closed-form solution of the state space equations is easily obtained when the system matrix F is diagonal. Hence, by finding a matrix P so that F1=PFP-1 is diagonal, the solution of the state equations is simplified considerably.
20. What is the condition to call a number λ an Eigenvalue of F and a nonzero vector U is the associated Eigenvector?
A. (F+λI)U=0
B. (F-λI)U=0
C. F-λI=0
D. None of the mentioned
Answer: B
A number λ is an Eigenvalue of F and a nonzero vector U is the associated Eigenvector if
FU=λU
Thus, we obtain (F-λI)U=0.
21. The determinant |F-λI|=0 yields the characteristic polynomial of the matrix F.
A. True
B. False
Answer: A
We know that (F-λI)U=0
The above equation has a nonzero solution U if the matrix F-λI is singular, which is the case if the determinant of (F-λI) is zero. That is, |F-λI|=0.
This determinant yields the characteristic polynomial of the matrix F.
22. The parallel form realization is also known as normal form representation.
A. True
B. False
Answer: A
The parallel form realization is also known as normal form representation, because the matrix F is diagonal, and hence the state variables are uncoupled.
23. If (101.01)2=(x)10, then what is the value of x?
24. If X is a real number with ‘r’ as the radix, A is the number of integer digits and B is the number of fraction digits, then X=\(\sum_{i=-A}^B b_i r^{-i}\).
A. True
B. False
Answer: A
A real number X can be represented as X=\(\sum_{i=-A}^B b_i r^{-i}\) where bi represents the digit, ‘r’ is the radix or base, A is the number of integer digits, and B is the number of fractional digits.
25. The binary point between the digits b0 and b1 exists physically in the computer.
A. True
B. False
Answer: B
The binary point between the digits b0 and b1 does not exist physically in the computer. Simply, the logic circuits of the computer are designed such that the computations result in numbers that correspond to the assumed location of this point.
26. What is the resolution to cover a range of numbers xmax-xmin with ‘b’ number of bits?
A. (xmax+xmin)/(2b-1)
B. (xmax+xmin)/(2b+1)
C. (xmax-xmin)/(2b-1)
D. (xmax-xmin)/(2b+1)
Answer: C
A fixed point representation of numbers allows us to cover a range of numbers, say, xmax-xmin with a resolution
Δ=(xmax-xmin)/(m-1)
where m=2b is the number of levels and ‘b’ is the number of bits.
27. What are the mantissa and exponent required respectively to represent ‘5’ in binary floating-point representation?
A. 011,0.110000
B. 0.110000,011
C. 011,0.101000
D. 0.101000,011
Answer: D
We can represent 5 as
5=0.625*8=0.625*23
The above number can be represented in binary float point representation as 0.101000*2011
Thus Mantissa=0.101000, Exponent=011.