Ques 11. For a synchronous motor, the maximum value of torque developed at an angle of
120 degree
45 degree
0 degree
90 degree
Answer 4. 90 degree
Explanation:
When a synchronous motor operates under load it draws active power from the line. The active power absorbs by the motor depends on the supply voltage E and excitation Voltage Eo.
Therefore power is given as
P = ( E × Eo/Xs)sinδ.
Where
P = mechanical power of the motor per phase Xs = synchronous reactance per phase δ = Torque angle between Eo and E.
This equation shows that the mechanical power increase with the torque angle and its maximum value is reached when δ = 90°.
Therefore peak power per phase is given as
Pmax = EoE/Xs.
The maximum torque occurs at a torque angle of 90 electrical degrees. This is called the pull-out torque, which indicates the maximum value of torque that a synchronous motor can develop without pulling out of synchronism. In general, its value varies from 1.25 to 3.5 times the full-load torque. In actual practice, however, the motor will never operate at a torque angle close to 90 electrical degrees because the stator current will be many times its rated value at this operation.
Ques 12. What happens to the synchronous motor when the excitation of an unloaded salient-pole synchronous motor suddenly gets disconnected?
Run as a variable reluctance motor
Run as the induction motor
Motor will stop
None of the above
Answer 1. Run as a variable reluctance motor
Explanation:
Reluctance torque is the torque generated because the motor is moving to a position where the reluctance seen by the armature flux is declining.
Reluctance exists only when there is an unsymmetrical air gap.
Therefore it exists only for Salient pole synchronous machines and does not exist for the cylindrical machine.
Reluctance torque comes into play when any winding is disconnected i.e. filed winding or armature winding in the running conditions
Reluctance torque also produces reluctance power which makes the machine more stable
The machine will continue to run at synchronous speed due to reluctance torque (i.e. even when field winding or armature windings are disconnected).
The rotor will remain in synchronism for a short time ie.. until the residual flux of the rotor decreases below a certain value.
Variable reluctance motor behaves as similar to silent pole synchronous motor unexcited.
And after the loss of residual flux, it will run as a reluctance motor due to the generation of reluctance torque.
Ques 13.A synchronous motor working at leading power factor can be used as
Synchronous induction motor
Static condenser
Synchronous condenser
None of the above
Answer 3. Synchronous condenser
Explanation:
When the synchronous motor operates at a leading power factor then Rotor is overexcited in such a way that the back emf (Ebwhich is generated in stator due to dc excitation of the rotor) is greater than the supply voltage (V).
In this case, a Synchronous motor will be operating at a leading power factor.
At this time resultant flux is greater than that is required for the unity power factor, then this extra flux will generate reactive power so the motor will generate reactive power. And it will use active power too for mechanical work.
Therefore synchronous motor working on leading PF will work as a synchronous condenser.
Ques 14. Which of the following motor is not self-starting?
Wound rotor induction motor
Squirrel cage induction motor
DC series motor
Synchronous motor
Answer 4. Synchronous Motor
Explanation:
The synchronous motor works on the principle of magnetic locking. The operating principle can be explained with the help of a 2-Pole synchronous machine with the following steps.
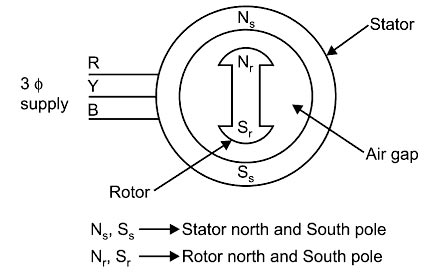
Let us consider a two-pole synchronous motor as shown in Figure. The three-phase supply is provided to the stator which induces two poles i.e North pole and the South pole on Stator. Since the supply in the stator is alternating in nature, therefore, its polarity changes in every half cycle, thus the poles of the stator also changes after every half cycle.
The synchronous motor rotor is energized by the DC current. The field current (D.C Current) of the motor produces a steady-state magnetic field. Since the polarity of the D.C current is fixed therefore the poles of the rotor don’t vary.
Therefore, there are two magnetic fields present in the machine. Stator poles changes in every half-cycle whereas rotor poles remain the same.
Step 1. When a three-phase supply is given to the stator winding, a rotating magnetic field is produced in the stator.
Step 2.
Due to the Rotating Magnetic field, let the stator poles i.e North poles (Ns) and South Poles (Ss) rotate with synchronous speed.
At a particular time stator pole, Ns coincides with the rotor poles Nr and SS coincides with Sr i.e like poles of the stator and rotor coincide with each other.
As we know, like poles experience a repulsive force. So rotor poles experience a repulsive force Fr. Let us assume that the rotor tends to rotate in the anti-clockwise direction as shown in Fig. (i).
Step-3.
After half cycle, the polarity of the stator pole is reversed, whereas the rotor poles cannot change their polarity as shown in Fig. (ii).
Now unlike poles of rotor and Stator coincide with each other and rotor experiences the attractive force fa and the rotor tends to rotate in the clockwise direction.
In brief, we can say, with the rotation of stator poles the rotor tends to drive in the clockwise and anti-clockwise direction in every half cycle.
Hence, to and fro motion is excited on the rotor and as a result, the rotor does not rotate. As a result, the average torque on the rotor is zero. Hence the 3-phase synchronous motor is not a self-starting motor.
Ques 15. Which of the following motor can operate on lagging as well as leading power factor?
DC series motor
Wound rotor induction motor
Squirrel cage induction motor
Synchronous motor
Answer 4. Synchronous motor
Explanation:
In a synchronous motor, there are two possible sources of excitation; alternating current in the stator or direct current in the rotor. The required flux may be produced either by stator or rotor or both.
(i) If the rotor exciting current is of such magnitude that it produces all the required flux, then no magnetizing current or reactive power is needed in the stator. As a result, the motor will operate at the unity power factor.
(ii) If the rotor exciting current is less (i.e., the motor is under-excited), the deficit in the flux is made up by the stator. Consequently, the motor draws reactive power to provide for the remaining flux. Hence motor will operate at a lagging power factor.
(iii) If the rotor exciting current is greater (i.e., the motor is over-excited), the excess flux must be counterbalanced in the stator. Now the stator, instead of absorbing reactive power, actually delivers reactive power to the 3-phase line. The motor then behaves like a source of reactive power, as if it were a capacitor. In other words, the motor operates at a leading power factor.
To sum up, a synchronous motor absorbs reactive power when it is under-excited and delivers reactive power to the source when it is over-excited.
Ques 16. A synchronous motor is switched on to supply with its field windings short-circuited. It will run as
DC series motor
Induction motor
First induction motor then runs as a synchronous motor
None of the above
Answer 2. Induction motor
Explanation:
The procedure to start a synchronous motor is as follows:
The field winding of the motor is short-circuited.
Stator winding is applied a reduced voltage using an auto-transformer when the motor is starting up.
Once the motor speed reaches a steady-state, a weak DC excitation is applied by removing the short-circuited field winding.
It is practically impossible to start a synchronous motor with its D.C. field energized. Even when left de-energized, the rapidly rotating magnetic field of the stator will induce extremely high voltages in the many turns of the field winding. It is customary, therefore, to short-circuit the D.C. field winding during the starting period; whatever voltage and currents are induced in it may then aid in producing induction motor action.
The short-circuited winding acts as a squirrel-cage rotor winding of an induction motor.
Upon excitation of the stator by a three-phase supply, the motor starts rotating as an induction motor at sub-synchronous speed and the DC supply is excited to the field winding.
Once the field winding is excited, the motor is pulled into synchronism and starts rotating at its synchronous speed. During this condition, the relative motion between the damper winding and the rotating magnetic field becomes zero.
Now, the motor behaves like a synchronous motor and it does not induce an emf in the damper winding.
Therefore, at the time of starting, the damper winding is used to run the motor as an induction motor, and afterward, it goes out of the circuit.
While starting a synchronous motor as an induction motor, the field winding is short-circuited by low resistance in this method. The number of poles in the Induction motor is less than the number of poles in the synchronous motor.
How synchronous motor acts as induction motor during the starting period
In the case of an induction motor, the field winding is permanently short-circuited by end rings.
In a Synchronous motor, the rotor winding is supplied with DC excitation. Now, if we eliminate the DC excitation, there are two ends of the wire available.
Let short circuit the two ends of the wire (or connect the two ends of variable resistors).
Now the rotor winding of the synchronous motor is analogous to that of an induction motor.
Therefore if we short circuit the field winding of a synchronous motor then it will behave as an induction motor until the DC excitation is not provided.
Ques 17.In a synchronous motor, the magnitude of back emf depends on________
Flux density
DC excitation
Load on the motor
Speed of the rotor
Answer 2. DC excitation
Explanation:
In the case of synchronous motor, once the rotor starts rotating at synchronous speed, the stationary stator conductors cut the flux produced by the rotor. The conductors are stationary and flux is rotating.
Due to this, there is an induced e.m.f. in the stator which according to Lenz’s law opposes the supply voltage.
This induced e.m.f. is called back em.f. in case of synchronous motor.
This back emf is due to the rotation of the rotor field at synchronous speed, this rotor field will be cut by stator conductors & as per electromagnetic induction, due to changes in magnetic field emf is generated which will oppose the applied voltage to the stator. This back emf magnitude will depend upon flux per pole and the speed of the motor.
It is denoted as Ebph i.e. back e.m.f. per phase. This gets generated as the principle of an alternator and hence alternating in nature and its magnitude can be calculated by the equation,
$Ebph = 4.44KcKdφf Tph$
or
Ebph = φ
As speed is always synchronous, the frequency is constant, and hence the magnitude of such back e.m.f. can be controlled by changing the flux ¢ produced by the rotor.
So back e.m.f. in case of the synchronous motor depends on the excitation given to the field winding and not on the speed, as speed is always constant.
Ques 18. The main reason for embedding the damper winding in the pole face is to
Eliminate losses on account of air friction
Reduce bearing friction
Eliminate hunting and provide starting torque
Eliminate air friction
Answer 3. Eliminate hunting and provide starting torque
Explanation:
“Hunting is the phenomenon of the synchronous machines which oscillates at about its new equilibrium position” which means the synchronous machines rotate at other than synchronous speed.
Use of Damper winding to prevent hunting
Hunting can be reduced by using damper winding.
When hunting occurs, the difference in the speed of stator and rotor poles develops and induces emf in the damper winding, which acts in such a way to suppress the rotor oscillation.
When the rotation at constant load is uniform, there is no relative motion between the rotor and stator forward rotating fields and hence no current is induced in these windings.
When the rotor speed is more than synchronous speed, induction generator torque will be produced through damper bars in the opposite direction to synchronous machine torque such that the above synchronous speed becomes nearer to synchronous speed. The relative motion of the rotor sets up eddy currents in these windings which flow such as to suppress the oscillations (as per Lenz’s Law).
When the rotor speed is less than synchronous speed, induction motor torque will be produced through damper bars in the same direction of synchronous machine torque such that below synchronous speed becomes nearer to synchronous speed.
The dampers should have low resistance . be more effective. However, this method cannot eliminate – completely.
Use of Damper winding to start synchronous motor
Along with the main field winding, an additional compensating winding consisting of copper bars is placed in the slots and these bars are short-circuited at its end rings. These windings are called damper windings.
The short-circuited winding acts as a squirrel-cage rotor winding of an induction motor.
Upon excitation of the stator by a three-phase supply, the motor starts rotating as an induction motor at sub-synchronous speed and the DC supply is excited to the field winding.
Once the field winding is excited, the motor is pulled into synchronism and starts rotating at its synchronous speed. During this condition, the relative motion between the damper winding and the rotating magnetic field becomes zero.
Now, the motor behaves like a synchronous motor and it does not induce an emf in the damper winding.
Therefore, at the time of starting, the damper winding is used to run the motor as an induction motor, and afterward, it goes out of the circuit.
While starting a synchronous motor as an induction motor, the field winding is short-circuited by low resistance in this method. The number of poles in the Induction motor is less than the number of poles in the synchronous motor.
Ques 19. A 3 phase, salient pole synchronous motor is fed from an infinite bus and is running at no load. Now if the field current of the motor is reduced to zero then the
Motor will run at synchronous speed
Motor will stop
Motor will run at low speed
Motor will burn
Answer 1. Motor will run at synchronous speed
Explanation:
An infinite bus is a system that imposes its own voltage and frequency upon any apparatus connected to its terminals. Once connected to a large system (infinite bus), a synchronous generator becomes part of a network comprising hundreds of other generators that deliver power to thousands of loads. It is impossible, therefore, to specify the nature of the load (large or small, resistive or capacitive) connected to the terminals of this particular generator.
For constant power output, a synchronous motor can be made to operate at either a lagging power factor, unity power factor, or leading power factor by varying the field excitation.
At normal excitation, the motor draws minimum armature current at unity power factor.
At under excitation the armature current increases and the power factor becomes lagging.
When the motor is overexcited it draws a current at the leading power factor.
An overexcited synchronous motor acts as a power factor correction device and is also known as a synchronous condenser. The variation of armature current and power factor as a function of field current is plotted to give a better insight.
When filed current is reduced to zero, reluctance torque comes into play. If the field winding of an unloaded salient pole synchronous motor is open-circuited the motor field current becomes zero and the synchronous motor runs as a reluctance motor.
Reluctance Torque:
Reluctance torque is the torque generated because the motor is moving to a position where the reluctance seen by the armature flux is declining.
Reluctance exists only when there is an unsymmetrical air gap.
Therefore it exists only for Salient pole synchronous machines and does not exist for the cylindrical machine.
Reluctance torque comes into play when any winding is disconnected i.e. filed winding or armature winding in the running conditions
Reluctance torque also produces reluctance power which makes the machine more stable.
Variable reluctance motor behaves as similar to silent pole synchronous motor unexcited.
And after the loss of residual flux, it will run as a reluctance motor due to the generation of reluctance torque.
The machine will continue to run at synchronous speed due to reluctance torque (i.e. even when field winding or armature windings are disconnected).
In a salient pole synchronous motor, the power flow is given by,
From the above equation, it is clear that even when the field winding is open the power in the synchronous motor is generated due to which the motor continuously runs at a synchronous speed.
Ques 20. The maximum value of torque that a synchronous motor, can develop without losing its synchronism, is known as
Pull out torque
Breaking torque
Slip torque
Non-synchronizing torque
Answer 1. Pull out torque
Explanation:
Torque Characteristics of Synchronous Motor
The different types of torques developed by a synchronous motor are as follows:
Pullout torque: Maximum steady-state torque developed by the motor for 1 minute before it pulls out of step due to overload or the maximum value of torque that a synchronous motor can develop without losing its synchronism.
Starting or breakaway torque: Torque developed at the instant of starting at zero speed with rated voltage applied at rated frequency.
Pull-up torque: Minimum torque developed by the motor during acceleration from rest to the pull-in speed.
Pull-in torque: It is defined as the maximum load torque under which the motor will pull its connected load inertia into synchronism at rated voltage and frequency when excitation is applied. At the pull-in point, the motor torque just equals the load torque. The torque developed by the armature and field windings becomes zero at synchronous speed and cannot pull the motor into step. The torque developed by a synchronous motor (when operating as an induction motor) at 95% speed (5% slip) is defined as “nominal pull-in torque” and is used as a characteristic value of the motor.
Synchronous torque: Steady-state (load dependent) torque developed during operation.
Maximum torque: The peak of the torque-slip curve at rated voltage. The stable operating range of the motor is between the slip corresponding to the maximum torque and the synchronous speed. If during transient changes in load, the slip increases beyond this point, the motor may stall.