41. Which of the following signals have a pole-zero plot as shown below?
A. a.u(n)
B. u(an)
C. anu(n)
D. none of the mentioned
Answer: C
From the given pole-zero plot, the z-transform of the signal has one zero at z = 0 and one pole at z = a.
So, we obtain X(z) = z/(z-A.
By applying inverse z-transform for X(z), we get
x(n) = anu(n).
42. Which of the following signals have a pole-zero plot as shown below?(Let M = 8 in the figure)
A. x(n) = an, 0≤n≤8 = 0, elsewhere
B. x(n) = an, 0≤n≤7 = 0, elsewhere
C. x(n) = a-n, 0≤n≤8 = 0, elsewhere
D. x(n) = a-n, 0≤n≤7 = 0, elsewhere
Answer: B
From the figure given, the z-transform of the signal has 8 zeros on the circle of radius ‘a’ and 7 poles at the origin.
So, X(z) is of the form
X(z) = \(\frac{(z-z_1) (z-z_2)……(z-z_8)}{z^7}\)
By applying inverse z-transform, we get x(n) = an, 0≤n≤7
= 0, elsewhere.
43. The z-transform X(z) of the signal x(n) = anu(n) has:
A. One pole at z = 0 and one zero at z = a
B. One pole at z = 0 and one zero at z = 0
C. One pole at z = a and one zero at z = a
D. One pole at z = a and one zero at z = 0
Answer: D
The z-transform of the given signal is X(z) = z/(z-A.
So, it has one pole at z = a and one zero at z = 0.
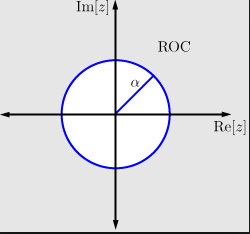
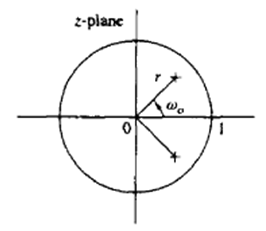
44. What is the nature of the signal whose pole-zero plot is as shown?
A. Rising signal
B. Constant signal
C. Decaying signal
D. None of the mentioned
Answer: C
From the pole-zero plot, it is shown that r < 1, so the signal is a decaying signal.
45. What are the values of z for which the value of X(z) = 0?
A. Poles
B. Zeros
C. Solutions
D. None of the mentioned
Answer: B
For a rational z-transform X(z) to be zero, the numerator of X(z) is zero and the solutions of the numerator are called ‘zeros’ of X(z).
46. If Y(z) is the z-transform of the output function, X(z) is the z-transform of the input function and H(z) is the z-transform of the system function of the LTI system, then H(z) =?
A. \(\frac{Y(z)}{X(z)}\)
B. \(\frac{X(z)}{Y(z)}\)
C. Y(z).X(z)
D. None of the mentioned
Answer: A
We know that for an LTI system, y(n) = h(n)*x(n)
On applying z-transform on both sides we get,
Y(z) = H(z).X(z) = >H(z) = \(\frac{Y(z)}{X(z)}\)
47. What is the system function of the system described by the difference equation y(n) = 0.5y(n-1)+2x(n)?
A. \(\frac{2}{1+0.5z^{-1}}\)
B. \(\frac{0.5}{1+2z^{-1}}\)
C. \(\frac{0.5}{1-2z^{-1}}\)
D. \(\frac{2}{1-0.5z^{-1}}\)
Answer: D
Given difference equation of the system is y(n) = 0.5y(n-1)+2x(n)
On applying z-transform on both sides we get, Y(z) = 0.5z-1Y(z)+2X(z)
By applying the inverse z-transform we get h(n) = 2(0.5)nu(n).
49. Which of the following method is used to find the inverse z-transform of a signal?
A. Counter integration
B. Expansion into a series of terms
C. Partial fraction expansion
D. All of the mentioned
Answer: D
The methods used to find the inverse z-transform of a signal are
Counter integration
Expansion into a series of terms
Partial fraction expansion
50. What is the inverse z-transform of
X(z) = \(\frac{1}{1-1.5z^{-1}+0.5z^{-2}}\) if ROC is |z|>1?
A. {1,3/2,7/4,15/8,31/16,….}
B. {1,2/3,4/7,8/15,16/31,….}
C. {1/2,3/4,7/8,15/16,31/32,….}
D. None of the mentioned
Answer: A
Since the ROC is the exterior circle, we expect x(n) to be a causal signal. Thus we seek a power series expansion in negative powers of ‘z’. By dividing the numerator of X(z) by its denominator, we obtain the power series