Method of starting of Synchronous Machine
As we know that the three-phase synchronous machine is not self-starting. The average synchronous motor torque is zero at rest. For a net average torque, the motor must reach near synchronous speed. Some auxiliary device is, therefore, necessary to bring the synchronous motor up to near synchronous speed. The methods most commonly used to bring the motor up to synchronous speed are:
- Starting with the help of a damper winding.
- Starting with the help of a separate small induction motor.
- Starting by using a dc motor coupled to the synchronous motor.
- Starting as an induction motor and run as a synchronous motor.
Starting with the help of a damper winding
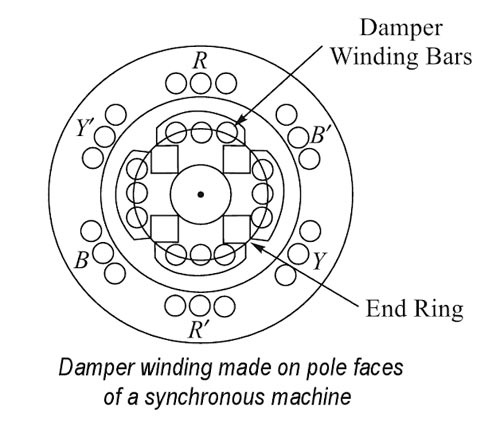
- To enable the synchronous machine to start independently as a motor, a damper winding is used. It is an additional winding in the synchronous machine which is provided in the pole face slots in addition to the normal field winding. Bars of aluminum, copper, bronze, or similar alloys are inserted in slots of pole shoes as shown in Fig. These bars are short-circuited by end-rings on each side of the poles. Thus these short-circuited bars form a squirrel-cage winding.
- When a three-phase supply is given to the stator, the synchronous motor with damper winding will start as a three-phase induction motor with the speed of rotation near to synchronous speed.
- When the motor has reached near synchronous speed as an induction motor, the d.c excitation is applied to the stator winding (field winding), and by the time the exciter voltage has built up sufficiently to magnetize the rotor poles the rotor will be pulled into synchronism. Once this speed has been attained, the rotor continues to run in synchronism.
- When the rotor rotates at synchronous speed, the relative motion between damper winding and the rotating magnetic field is zero. Hence when the motor is running as a synchronous motor, there cannot be any induced e.m.f. in the damper winding. So damper winding is active only at the start, to run the motor as an induction motor at start.
- A reduced supply voltage may be necessary, to limit the starting current drawn by the motor. In this method since starting is done as an induction motor, the starting torque developed is rather low. Hence a large capacity synchronous motor may not be able to start on full load if damper winding starting is employed. This method is only suitable when the load is small or there is no load.
Starting as an induction motor and run as a synchronous motor
- The damper winding method of starting a synchronous motor as a squirrel cage induction motor does not provide high starting torque. So to achieve high starting torque a synchronous motor that has a starting cage on its rotor can be started as a squirrel-cage induction motor. Asynchronous starting is today the main method of starting synchronous motors.
- The field winding of a synchronous motor, with induction starting, should be short-circuited or closed via a resistance whose value is about ten times that of the resistance of the field winding itself. If the field winding were left open when the motor is started, then the high voltage would be induced across its terminals, owing to a large number of turns in the winding, that it could lead to a breakdown of the insulation.
- With induction starting, the stator winding of the synchronous motor is connected to an a.c. supply mains, a torque is developed into the motor and it accelerates the motor to a speed close to synchronous speed. It runs as an induction motor with some degree of the slip or lagging behind the speed of the rotating magnetic field. If we now switch in direct current to the field winding, it gives rise to alternate N and S poles on the rotor. As the direct current excitation is, fixed, the pole axes are also fixed relative to the rotor winding.
- The presence of the constant-polarity poles results in some swinging of the rotor speed in relation to its average speed, and it becomes possible at some moments not only to attain the synchronous speed but also to exceed it for short intervals. If the motor has attained such a speed, then the synchronous motor is pulled into the synchronous speed. The less the motor is loaded, the smaller is its slip relative to the synchronous speed and easily it is pulled into synchronism under such swingings.
Starting by Using a D.C Motor Coupled to the Synchronous Motor
The dc motor drives the synchronous motor and brings it to synchronous speed. The synchronous machine is then synchronized with the bus-bar. When the synchronous machine operates in parallel conditions, the synchronous machine will work as a motor, driving the dc machine which may be used to work as a generator. Therefore the load can be connected to the synchronous motor.
Starting with the Help of a Separate Small Induction Motor
In this method, a separate induction motor is used to bring the speed of the synchronous motor to synchronous speed. The number of poles of the synchronous motor needs to be more than that of poles of the induction motor to enable the induction motor to rotate at the synchronous speed of the synchronous motor. As the set attains synchronous speed, dc excitation is applied and as the rotor and stator of the synchronous motor are pulled in synchronism, the induction motor is switched off.
The disadvantage of this method is the impossibility of starting the motor under load since it is impractical to have a large auxiliary starting motor. This method is, therefore, used mainly for motor-generators which convert alternating current into direct current and can be started by a D.C. machine by using the generator at starting as a motor. This method can also be used in high-power synchronous condensers.