Working Principle of DC motor
- The DC motor work on the principle when the current-carrying conductor is placed in a magnetic field it experiences a mechanical force.
- The force is experienced from high flux density to low flux density.
- Magnitude of force experienced by the armature conductor is
F = BIL NEWTON
Where
B = magnetic flux density produced by the field winding
L = Active length of the conductor
I = Magnitude of the current-carrying by the conductor - The direction of the force is determined by Fleming’s left-hand rule.
Fleming’s Left-hand Rule
- When a current-carrying conductor such as a wire attached to a circuit moves placed in a magnetic field, an electric current is induced in the wire due to Faraday’s law of induction.
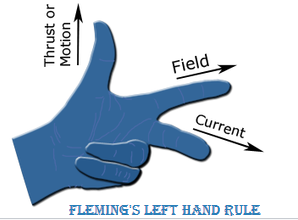
- The left hand is held with the thumb, first finger and second finger mutually perpendicular to each other than
- The thumb is pointed in the direction of the motion of the conductor relative to the magnetic field i.e direction of the force.
- The forefinger is pointed in the direction of the magnetic field.
- The middle finger represents the direction of the induced or generated current within the conductor.
Note:⇒
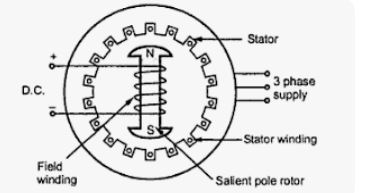
- On the basis of their construction, there is no difference between a D.C generator and a D.C motor.
- The same D.C machine can be used as the D.C motor and generator
- As in D.C generator flux is created by field winding.
- Armature winding acts as a current-carrying conductor.
A DC motor is a machine which converts DC power or current into the mechanical output.
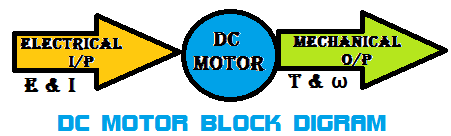
Here the input voltage is in the form of voltage and electrical and the mechanical output is in the form of torque (T) and speed (ω).
In this section, we will study about the Principle of DC motor, its working, and rules related to DC machine.
Back EMF in D.C Motor
- When the motor starts rotating its conductor will cut the magnetic flux produced by the field winding.
- Therefore by Faraday’s law of electromagnetic induction, EMF will be induced in the motor just like in the case of the DC generator.
- So the question arises how the Back EMF comes from and why we are calling it as Back Emf?
Let’s get it easily.
As per Newton’s 3rd law which is applicable to electrical circuits as Lenz’s law says that every action opposes its cause. Similarly, in motors, the voltage applied is the cause for the motion and hence the applied voltage is opposed by the emf developed by the motor which is called as back emf.
- In short back emf is generated by the generating action (moving conductor cutting the magnetic flux).
- Therefore the back emf will have an equation same as the emf equation of the generator.

where Φ = Flux per pole
P = Number of pole
Z = Total number of conductors
A = Number of Parallel Path
N = Speed of a DC motor
- The back emf is always less than the applied voltage “V” although the difference may be very small when the motor runs under its normal operating condition.
Why is DC motor self-regulating?
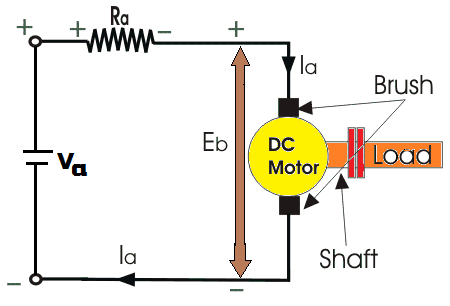
- In the given figure the DC motor is in series with the armature resistance Ra.
- When the supply voltage is applied across the motor brushes the field magnets are excited and the electric current starts to flow through the rotor armature, therefore, driving torque ” T ” is produced.
- Due to this armature torque, the armature of DC motor rotates.
- As the armature rotates the back Emf is generated in such a way that it tries to oppose the armature current which is produced by the supply voltage Va.
- So the voltage equation for the DC motor is
Va = IaRa + Eb - Now from the back emf equation, we can say that the Eb is directly proportional to the speed of the DC motor so when the speed of DC motor reduces the back emf also reduces.
- Since back Emf is smaller than the applied voltage, therefore, the difference between back emf and supply voltage increases i.e Va – Eb increases.
- Now Ia = Va – Eb/ Ra therefore, armature current increases hence torque and speed increase.
- From the above discussion, we can say that DC motor can maintain the same speed with a variable load.
- Back emf act as governor i.e it makes motor self-regulating because it draws as much current as is just necessary.