Synchronous Motor MCQ with Explanation-2021 | Objective Type Question of Synchronous Motor
Ques 1. For power factor correction, synchronous motors operate at
No load with over-excited fields
No load with under-excited fields
Normal load with minimum excitation
Normal load with zero excitation
Answer 1. No load with over-excited fields
Explanation:
When the Synchronous motor is operated at no load with overexcitation, it takes current that leads the voltage by nearly 90° which means the motor works like a capacitor. When operated under this condition, the synchronous motor is called a synchronous capacitor or synchronous compensator.
A synchronous compensator is an overexcited synchronous motor running on no load. It can generate or absorb reactive power by changing the field current. In overexcitation mode, it delivers inductive power or absorbs capacitive VAr. While in under excitation mode, it delivers capacitive power or absorbs inductive VAr. Specially designed synchronous machines, called synchronous condensers or synchronous capacitors, do not consist of any shaft coming out through the frame so that no load could be connected with it.
Applications of Synchronous Motor
Synchronous motors find extensive application in the following classes of services.
(1) Power Factor Correction
Overexcited synchronous motors operate at leading power factor and hence they are widely used for improving the power factor of those power systems which are connected with various induction motors and other lagging loads like welders and fluorescent lights, etc. However, nowadays, static capacitors are widely used for power factor correction because they are more economical than synchronous capacitors.
(2) Constant Speed Application
A synchronous motor runs at synchronous speed. Therefore, this motor is a perfect choice where constant speed is necessary like in centrifugal pumps, belt-driven compressors, blowers, line shafts, rubber and paper mills, etc.
(3) Voltage Regulation
When large inductive loads are connected, the voltage at the end of a long transmission line changes a great deal. As such, if a particular load is disconnected suddenly, the voltage may increase greatly going above the normal operating voltage which can damage the connected equipment. Using a synchronous motor with the field regulator, this voltage can be limited to a prescribed value.
Moreover, when the line voltage decreases due to inductive load, by increasing motor excitation the power factor is increased compensating for the line drop. Similarly, if the line voltage increases due to the line capacitive effect, by decreasing the motor excitation its pf is made lagging, thus maintaining the line voltage at its normal value.
Ques 2. What happens if the field winding of the synchronous motor is short-circuited?
First, starts as induction motor then run as synchronous motor
Not start
Motor will burn out
Run as induction motor
Answer 4. Run as induction motor
Explanation:
If voltage is impressed on the armature winding when the motor is at standstill with field winding unexcited, the revolving field produced by stator currents will cut across the field winding, thereby inducing a high voltage in the field winding.
This induced voltage would be dangerous and would often result in the breakdown of insulation of field winding. Therefore, in starting a synchronous motor, the field winding is shorted through a suitable resistance.
Consequently, the induced voltage is distributed throughout the whole winding and no part is subjected to high voltage.
The resistance is removed and excitation is applied to the rotor when the motor attains 90-95% of synchronous speed.
In the case of an induction motor, the field winding is permanently short-circuited by end rings.
In a Synchronous motor, the rotor winding is supplied with DC excitation. Now, if we eliminate the DC excitation, there are two ends of the wire available.
Let short circuit the two ends of the wire (or connect the two ends of variable resistors).
Now the rotor winding of the synchronous motor is analogous to that of an induction motor.
Therefore if we short circuit the field winding of a synchronous motor then it will behave as an induction motor.
Note:- Unless we don’t remove resistance it will behave like as in induction motor hence option 4 is correct.
Ques 3. If the field winding of an unloaded salient pole synchronous motor is open-circuited the motor will
In a salient pole synchronous motor, in addition to the torque developed by the interaction of the magnetic field with the armature current, a torque is produced due to the difference between the direct axis and the quadrature axis synchronous reactances.
A non-uniform air gap accompanies a salient-pole synchronous machine.
The air gap is minimum under the pole centers, and it is maximum in between the poles.
The pole faces are so shaped that the radical air gap length increases from the pole center to the pole tips so that the flux distribution in the air gap is sinusoidal.
This will help the machine generate sinusoidal EMF.
To give the alternate north and south polarities, the individual field-pole windings are connected in series.
The end of the field windings is connected to a DC winding by the brushes on the slip-rings.
When Field current is reduced to zero:
When filed current is reduced to zero, reluctance torque comes into play. If the field winding of an unloaded salient pole synchronous motor is open-circuited the motor field current becomes zero and the synchronous motor runs as a reluctance motor.
Reluctance Torque:
Reluctance torque is the torque generated because the motor is moving to a position where the reluctance seen by the armature flux is declining.
Reluctance exists only when there is an unsymmetrical air gap.
Therefore it exists only for Salient pole synchronous machines and does not exist for the cylindrical machine.
Reluctance torque comes into play when any winding is disconnected i.e. filed winding or armature winding in the running conditions
Reluctance torque also produces reluctance power which makes the machine more stable.
Variable reluctance motor behaves as similar to silent pole synchronous motor unexcited.
And after the loss of residual flux, it will run as a reluctance motor due to the generation of reluctance torque.
The machine will continue to run at synchronous speed due to reluctance torque (i.e. even when field winding or armature windings are disconnected).
In a salient pole synchronous motor, the power flow is given by,
From the above equation, it is clear that even when the field winding is open the power in the synchronous motor is generated due to which the motor continuously runs at a synchronous speed.
Note:-When the field circuit of an unloaded gradient pole synchronous motor suddenly opens, it continues to run at the same speed. Because the torque is produced in the synchronous motor due to the salient pole, which is generated due to the uneven resistance of the magnetic field.
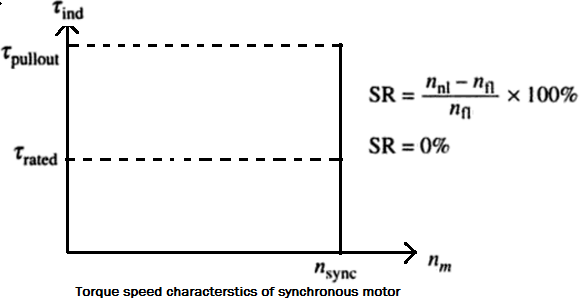
Ques 4. The speed regulation of a synchronous motor is
100%
50%
25%
0%
Answer 4. 0%
Explanation:
The speed regulation of a motor expresses how much its speed varies between no-load and full load. The synchronous motor runs at a constant speed whose magnitude is dependent on supply frequency and the number of poles.
The steady-state speed of the motor is constant from no load to the maximum torque that the motor can supply (called pull-out torque).
where
nnl= no-load speed nfl = full load speed
Since the speed of the motor is constant hence its speed regulation is zero.
Ques 5. The negative phase sequence in a three phase synchronous motor exists when the motor is
Supplied with an unbalanced voltage
Supplied with an unbalanced load
Unbalanced system fault
All of the above
Answer 4. All of the above
Explanation:
Negative phase sequence current in Synchronous motor
Negative sequence currents are produced because of the unbalanced currents in the power system.
The flow of negative sequence currents in electrical machines (generators and motors) is undesirable as these currents generate high and possibly dangerous temperatures in a very short time.
Phase current and voltage in the three-phase system can be represented in the form of three single-phase components.
Positive sequence components, Negative sequence components, and Zero sequence components.
Positive sequence currents exist during the balanced load condition.
Causes and effects of Negative Sequence Components :
The main cause of negative phase sequence components are:-
Unbalanced loads in the system
Unbalanced system faults (line to ground faults, two-phase faults, three-line to ground faults, double line to ground faults)
Open phases (open circuit faults).
Effects of Negative Sequence Components
When the load on the generator becomes unbalanced, negative phase sequence currents flow.
The negative sequence components produce a rotating magnetic field that rotates at synchronous speed in a direction opposite to the direction of the rotor field. Hence effectively the relative
Hence effectively the relative speed between the two is double the synchronous speed. Thus double frequency currents are induced in the rotor.
This double-induced high-frequency currents will rise the rotor temperature very high and damages the machine if operates continuously.
Ques 6. In 3 -Φ synchronous motor if one of the phases is short-circuited the motor will
Run as before
Overheated and eventually burn
Not start
Burn
Answer 2. Overheated
Explanation:
When one phase of synchronous motor is short-circuited
Single phasing in a three-phase machine means that one of the three phases of the supply has been cut off due to any reason, one phase fuse blown or removed, or disconnection somewhere in one phase.
The motor, when already running, keeps on running as a single-phase motor making a characteristic noise. This is a single phasing condition because the current in both the remaining lines now is the same single current.
In star connected stator, the load 1s taken by the remaining two phases so the motor now can take a load of 1/√3 times, (57.7%) it’s rating.
Since now in single phasing operation, for the same current and voltage P = VI cosφ; while in 3-phase operation, P = √3VIcosφ.
So if the motor is operating at a load near full load, the active phases will be overloaded.
If the stator is delta connected which is usually the case, the current distribution in different phases is not the same. One of the windings gets overloaded even when the current in the active lines is normal.
In a case when any of the three phases fails, in order to compensate the motor, starts drawing more amount of current heating the motor even in some cases could burn the motor.
In 3-φ synchronous motor, if one of the winding is short circuit then the motor will run with excessive vibrations.
More clearly it depends upon the load:
Less than 1/3rd of the rated load, it will continue to operate without any harm.
Higher than 1/3rd of rated load, the motor will continue to operate, but will draw current more than its rated value. The motor temperature will start increasing.
Higher load (near to the rated load), the motor speed will drop gradually to zero.
Note:- In this case, the thermal overload relay may stop the motor current or the fuse may blow. If thermal overload relay/fuses are not provided, the motor may get but burnt.
Ques 7. For a synchronous motor, the breakdown torque will be proportional to
Applied voltage V
V2
1/V
1/V2
Answer 1. Applied voltage V
Explanation:
Breakdown torque is the maximum torque of the motor, which is produced at full rated voltage and frequency.
Power in the synchronous motor is given as
P = 2NT/60 V2
From the above equation, it is clear that torque T ∝ P.
The pull-out torque with excitation is supplied with a constant voltage source which varies directly with motor terminal voltage. Therefore as power varies as applied voltage V, the torque of a synchronous motor is also varies as applied voltage V.
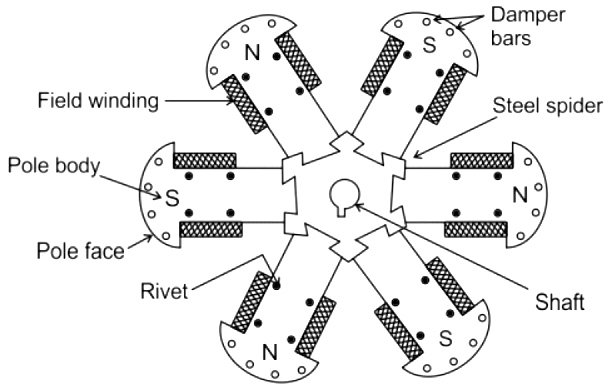
Ques 8. In a synchronous motor, during hunting when the rotor speed exceeds the synchronous speed then damper bar develop
Induction generator torque
Harmonic
DC motor torque
Synchronous motor torque
Answer 1. Induction generator torque Explanation:
Explanation:
“Hunting is the phenomenon of the synchronous machines which oscillates at about its new equilibrium position” which means the synchronous machines rotate at other than synchronous speed.
Use of Damper winding to prevent hunting
Hunting can be reduced by using damper winding.
When hunting occurs, the difference in the speed of stator and rotor poles develops and induces emf in the damper winding, which acts in such a way to suppress the rotor oscillation.
When the rotation at constant load is uniform, there is no relative motion between the rotor and stator forward rotating fields and hence no current is induced in these windings.
When the rotor speed is more than synchronous speed, induction generator torque will be produced through damper bars in the opposite direction to synchronous machine torque such that the above synchronous speed becomes nearer to synchronous speed. The relative motion of the rotor sets up eddy currents in these windings which flow such as to suppress the oscillations (as per Lenz’s Law).
When the rotor speed is less than synchronous speed, induction motor torque will be produced through damper bars in the same direction of synchronous machine torque such that below synchronous speed becomes nearer to synchronous speed.
The dampers should have low resistance . be more effective. However, this method cannot eliminate – completely.
Ques 9. In a synchronous motor, at no-load condition, and with normal excitation the armature current drawn by a synchronous motor is
Zero
Lagging applied voltage by 90°
Leading Applied voltage by 90°
In phase with applied voltage
Answer 2. Lagging applied voltage by 90°
Explanation:
Synchronous Motor Phasor Diagrams
Consider a normally-excited synchronous motor (i.e. Eb = V) supplied with fixed excitation. Since field excitation and speed of the motor = synchronous speed are fixed, the value of Eb remains the same.
Let
V = supply voltage/phase
Eb = back e.m.f./phase
Er = Net voltage
Zs = synchronous impedance/phase
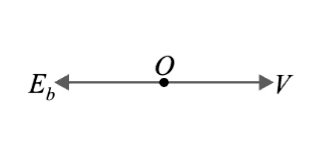
(i) Motor on no-load with no losses:-
When the synchronous motor is on no-load and has no losses, the center lines of rotor poles and stator poles coincide and the torque angle δ is practically 0°.
Under this condition, the back e.m.f. Eb, is equal and opposite to the supply voltage V as shown in the phasor diagram in Fig.
Since net voltage Er = V − Eb is zero, the armature current Ia = Er/Zs is zero. This is expected because there is neither load nor motor losses. Now, the motor just floats.
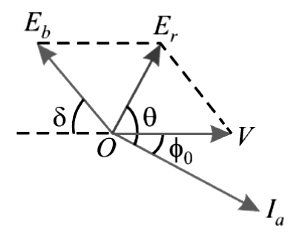
Motor on no-load with losses
If the motor is on no-load but it has losses, the torque angle increases by a small angle δ.
Consequently, the vector Eb (its magnitude is constant as excitation is fixed) falls back (vectors are rotating in an anticlockwise direction) by angle δ as shown in Fig.
The resultant or net voltage Er in the stator causes the stator or armature current Ia = Er/Zs to have some finite value to supply the no-load losses.
Note that armature current Ia lags behind Er by a small angle θ = tan−1 Xs/Ra. Since Xs >> Ra, Ia, lags Er by nearly 90° (∵ θ = tan−1 Xs/0 = 90°). The phase angle between V and Ia is φo so the no-load power factor is cosφo.
No-load input power/phase = VI, cosφo,
Thus at no-load, the motor takes a small power VI, cosφo/phase from the supply to meet the no-load losses while it continues to run at synchronous speed.
Hence Under no-load conditions with normal excitation, armature current Ia drawn by a synchronous motor lags the applied voltage V by a small angle.
Ques 10. In a synchronous motor, hunting occurs due to______
Over excitation
Periodic variation
Over-loading for long periods
Small and constant load
Answer 2. Periodic variation
Explanation:
A synchronous motor is very sensitive to fluctuation in the load. When the synchronous motor is under no load the stator and rotor poles axes almost coincide with each other.
When the motor is loaded the rotor pole axis falls back with respect to the stator. On the other hand, if the rotor poles are suddenly decreased then the rotor poles pull upward or get advanced. Due to the inertia of the rotor, it can’t achieve its final position instantaneously. Therefore rotor will oscillate to its final new stable position. This oscillation of the rotor is known as hunting.
OR
The word hunting is used because after the sudden application of load. The rotor has to search or hunt for its new equilibrium position. That phenomenon! is referred to as hunting in a synchronous motor. A load containing harmonic torque fault in the supply system, change in field| current are causes of Hunting.
Causes of Hunting in Synchronous Machines
A sudden change in load.
The sudden change in field current.
A load containing harmonic torque.
Fault in the supply system.
Periodic Variation of the load
Effects of Hunting
Hunting increases the chance of loosing synchronism.
Hunting causes variations in the supply voltage.
Hunting increases the possibility of resonance.
Due to hunting, huge mechanical stresses may be developed in the rotor shaft.
Machine loss increases during hunting.
The temperature of the machine rises during hunting.
Use of Damper winding to prevent hunting
Hunting can be reduced by using damper winding.
When hunting occurs, the difference in the speed of stator and rotor poles develops induces emf in the damper winding, which acts in such a way to suppress the rotor oscillation.
The induced emf generated develop induction torque in the synchronous motor.
Note: Mechanical losses such as friction loss does not cause hunting.