Eb = Back EMF or excitation because back EMF Eb in Synchronous Motor depends on the DC excitation only because speed is constant
The power developed depends on the excitation, voltage and coupling angle. The maximum value of θ and hence δ is 90°. An increase in the excitation results in an increase of Pmax. Consequently, the load angle decreases for a given power developed. The overload capacity of the motor increases with an increase in excitation and the machine becomes more stable.
For all values of V and Eb, this limiting value of δ is the same but maximum torque will be proportional to the maximum power developed
If the resistance of the armature is negligible, then
Hence the power developed will me maximum when δ is 90°.
Ques.32. The power factor of a synchronous motor, When the field is under-excited(SSC-2018 Set-5)
Leading
Unity
Lagging
Zero
Answer.3. Lagging
Explanation
Unlike the induction machine, the synchronous machines can operate at lagging, leading, and unity power factors. In an induction machine, a magnetizing current is required to establish flux in the air gap. This magnetizing current lags the voltage and therefore, the induction machine always operates at lagging power factor.
On the other hand, in the synchronous machine, the total air gap flux is produced by dc source and there is no use of lagging current from the ac system for the production of air-gap flux. If dc excitation is decreased, lagging reactive power will be drawn from ac source to aid magnetization and thus machine will operate at lagging power factor. If dc excitation is more, leading current drawn from ac source to compensate (oppose) the magnetization and the machine will operate a leading power factor.
Thus it can be concluded that an over-excited motor(Eb > V) draws a leading current (acts like a capacitive load) but an under-excited motor(Eb < V) draws a lagging current (acts like an inductive load).
Ques.33. To limit the operating temperature of the synchronous motor, it should have proper (SSC-2018 Set-5)
Rated current:- Rated current in is the maximum permissible current that can be maintained permanently, which at the same time does not cause any overheating, damages, faults, or accelerated aging. In AC machines, the rated current implies the RMS value of the winding current.
Electrical currents in windings of electrical machines produce losses and develop heat, increasing the temperature of conductors and insulation. Current in the windings creates Joule losses which are proportional to the square of the current. The temperature of the machine is increased in proportion to generated heat. If the current is increased beyond the rated current then the temperature of the synchronous motor will also increase.
This excessive temperature rise may cause insulation failure. The life of the machine depends upon the life of the insulation. If the machine is continuously operated above the specified temperature limit, the life of the insulation, and hence the life of the machine will be reduced. By providing proper ventilation and
Saturation of the Magnetic Circuit: The saturation of the magnetic circuit disturbs the straight-line characteristics of the magnetization (B-H) curve resulting in increased excitation required and hence higher cost for the field system.
Insulation: The insulating properties and the strength of the insulating materials are considered on account of breakdown due to excessive voltage gradients set up in the machine.
Mechanical Strength: The machine should have the ability to withstand centrifugal forces and other stresses.
Efficiency: The efficiency of the machine should be high for the low running cost. The specific magnetic and electric loading should be low to achieve high efficiency. With the low value of magnetic and electric loadings, the size of the machine will be larger and hence more capital cost (initial investment).
Ques.34. A synchronous machine with large air gap has (SSC-2018 Set-5)
A higher value of stability limit
A higher synchronizing power
A small value of regulation
All options are correct
Answer.4. All options are correct
Explanation:-
In Synchronous Machine the Magnetic Flux is set up separately by Field Winding. The Emf induced in the Stator Armature Winding is not by Mutual induction it is a Dynamically induced Emf due to relative motion between the Field and Conductors.
The length of the air gap greatly influences the performance of a synchronous machine. A large air gap offers a large reluctance to the path of flux produced by the armature MMF and thus reduces the effect of armature reaction. This results in a small value of synchronous reactance and the high value of SCR.
A high value of SCR (short circuit ratio) means that the synchronous reactance has a low value, synchronous machines with the low value of SCR thus have greater changes in voltage under fluctuations of load i.e., the inherent voltageregulation of the machine is poor.
Thus a machine with a large air gap has a high synchronizing power which makes the machine less sensitive to load variations.
Ques.35. Synchronous motor speed (SSC-2018 Set-5)
Decreases as the load decreases
Increases as the load increases
Always remains constant
None of these
Answer.3. Always remains constant
Explanation:-
The principle of working of the synchronous motor is magnetic locking. Both stator and rotor and separately excited. The rotor catches the flux speed and gets locked with revolving filed of the stator and then rotates at that speed. In the case of synchronous motor speed always remains constant equal to the synchronous speed, irrespective of load condition.
Ques.36. The magnitude of field flux in a 3-phase synchronous machine (SSC-2018 Set-5)
Varies with speed
Remains constant at all loads
Varies with power factor
Varies with the load
Answer.2. Remains constant at all Load
Explanation:-
In a synchronous motor, the counter emf is proportional to the speed and field flux.
Since the speed is constant in a synchronous motor, therefore, field flux is substantially constant within the normal limit of operation.
If field excitation is increased thereby tending to increase the field flux that varies only slightly, there must be an automatic change in the armature MMF in order to offset the effect of the increased field excitation. The armature current must, therefore, contain a leading component, hence the leading current in a synchronous motor exerts a demagnetizing effect.
By the same reasoning, it follows that a weakening of the field excitation tends to draw a lagging current from the source of supply. For any set of operating conditions, there will be some value of field excitation which will cause the power factor to be unity, i.e., the current to be in phase with the terminal voltage.
When this condition exists while the motor is carrying its rated load, the motor is said to have normal excitation.
Ques.37. In a synchronous motor, the magnitude of back e.m.f depends on (SSC-2018 Set-6)
The speed of the motor
DC excitation Only
Load on the motor
Both the speed and rotor flux
Answer.2. DC excitation Only
Explanation:-
In the case of the synchronous motor also, once the rotor starts rotating at synchronous speed, the stationary stator (armature) conductors cut the flux produced by the rotor. The only difference is conductors are stationary and flux is rotating. Due to this, there is an induced e.m.f. in the stator which according to Lenz’s law opposes the supply voltage. This induced e.m.f. is called back e.m f. It is denoted as Ebph i.e. back e.m.f. per phase. The back E.M.F is alternating in nature and its magnitude can be calculated by the equation.
Ebph = 4.44.φ.f.Tph
Where
ϕ is Flux per pole
Tph is the number of turns connected in series per phase
f be the frequency
As speed is always synchronous, the frequency is constant and hence the magnitude of such back e.m.f. can be controlled by changing the flux φ produced by the rotor.
Ebph ∝ Φ
So back e.m.f. in case of the synchronous motor depends on the excitation given to the field winding and not on the speed, as speed is always constant.
Ques 38. The speed of the rotor magnetic flow in the rotor body is (SSC-2017)
Synchronous
Asynchronous
Zero
None of these
Answer.2. Asynchronous
Explanation:
An induction motor cannot run at Synchronous speed because if the rotor was to accelerate to the speed of the rotating magnetic field, there would be no cutting action of the squirrel-cage bars and. therefore, no current flow in the rotor. if there was no current flow in the rotor, there could be no rotor magnetic field and. therefore, no torque.
Ques 39. Which one of the following can be obtained by the equivalent circuit of an electrical machine? (SSC-2017)
Temperature rise in the cores
Complete performance characteristics of the machine
Type of protection used in the machine
Design Parameters of the windings
Answer.2. Complete performance characteristics of the machine
Explanation:
An equivalent circuit of an electric machine helps us to determine the complete performance of the machine e.g efficiency, losses etc.
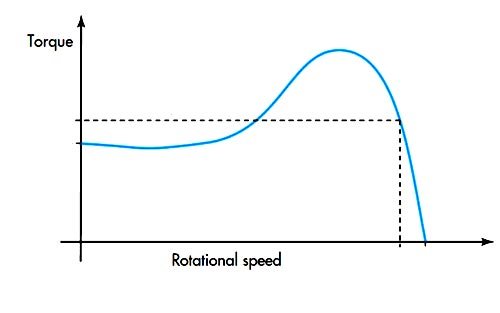
Ques.40. Which of the following motors is represented by the characteristics curve shown below? (SSC-2016)
D.C shunt Motor
D.C Compound Motor
D.C series Motor
Asynchronous Motor
Answer.4. Asynchronous Motor
Explanation:-
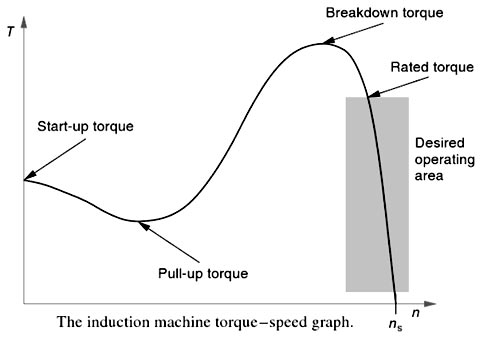
The induction motor is also known as an asynchronous motor. To start the induction motor, let us assume that the induction motor has been started without any load on it. The motor will come to its no-load speed, which may be at a slip as low as 0.1 percent.
At full load, the motor runs at a speed of N. When mechanical load increases, motor speed decreases till the motor torque again becomes equal to the load torque. As long as the two torques are in balance, the motor will run at constant (but lower) speed.
The motor may be loaded continuously till pull out (or break down) torque is developed, at which point the motor will Stop if more load is placed on it.